

Path planning for blade polishing with fixed abrasive tool base on robotic platform
-
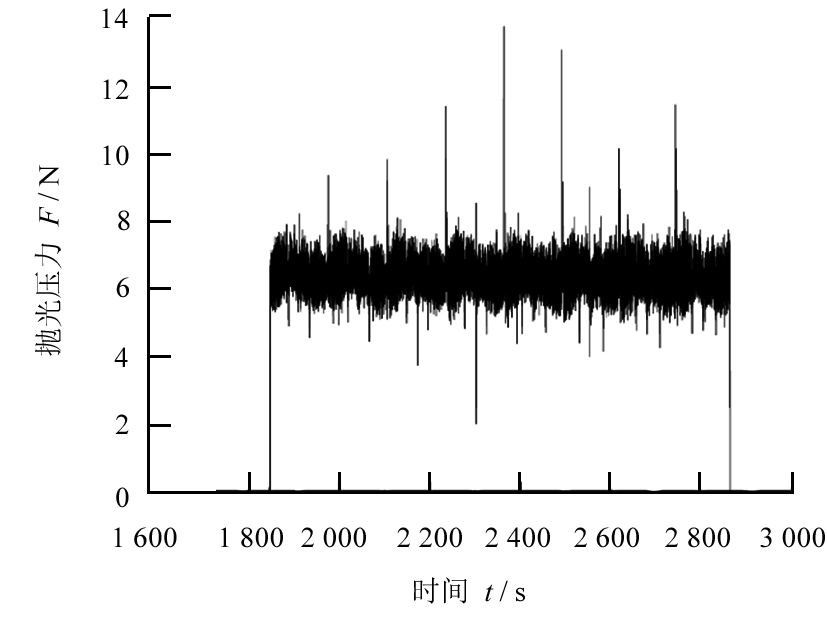
摘要: 将6R机器人与固结磨料抛光技术相结合,建立基于机器人的固结磨料磨头抛光系统;应用弦高误差法与改进的等残留高度法规划发动机叶片抛光路径,基于UG二次开发实现路径规划算法,并提取刀位点数据;结合机器人运动学逆解算法与抛光工艺参数实现其抛光路径离线编程,并在机器人固结磨料磨头恒压抛光试验平台上进行叶片抛光试验验证。试验结果表明:叶片表面平均粗糙度Ra为0.240 μm,粗糙度标准差为0.039 μm,抛光压力误差为±0.7 N。机器人固结磨料磨头抛光叶片获得的表面质量一致性较好。Abstract: The 6R robotic and the fixed abrasive polishing technology were combined to develop a robotic-based fixed abrasive polishing system.The constant chord-height error method and the improved constant residual-height method were used for planning blade polishing path.Based on the secondary development of the software UG, path planning algorithm was realized and the data of cutter points was extracted.Combining with the inverse kinematics algorithm of robot and polishing process parameters, the off-line programming of polishing path was realized, and the blade polishing test was verified on the constant pressure polishing test platform of robot consolidated abrasive grinding head.The main results show that the average surface roughness of the blade is 0.240 μm, the standard deviation of the roughness is 0.039 μm, and the polishing pressure error is ±0.7 N. The high consistency of surface quality of blade was obtained by applying the robotic-based consolidated abrasive grinding head.
-

图 1 叶片抛光轨迹刀位点提取流程
Figure 1. Flow chart of blade polishing path tool location extraction

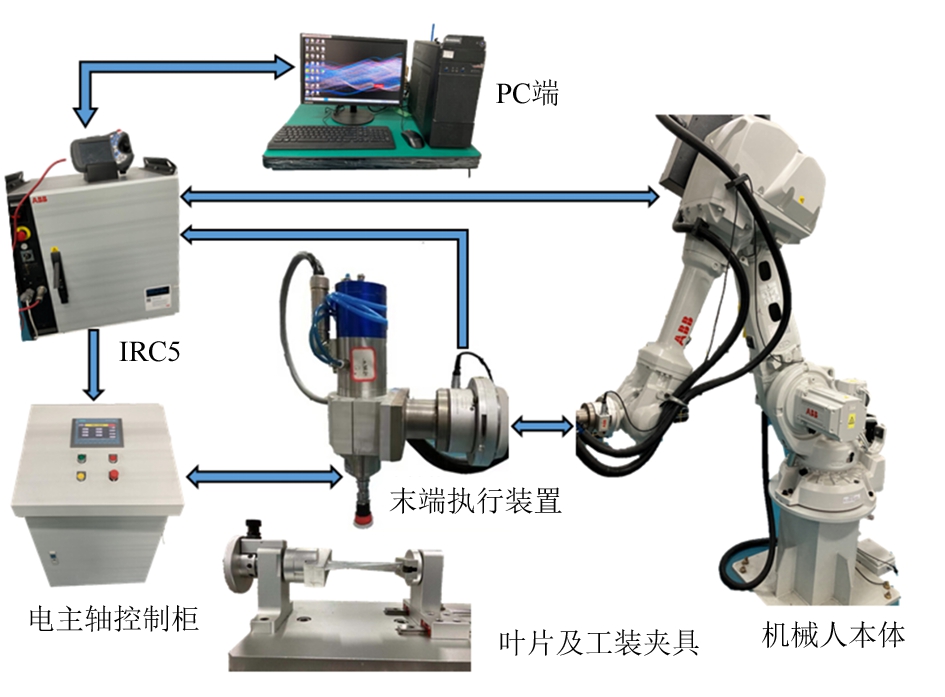
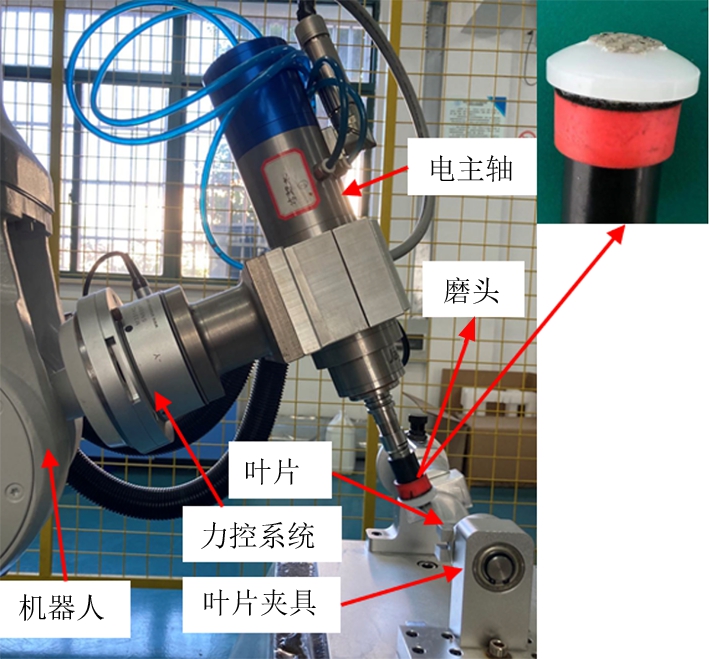
图 6 机器人固结磨料磨头恒压抛光试验平台
Figure 6. Constant pressure polishing test platformfor robotic-based consolidated abrasive grinding head

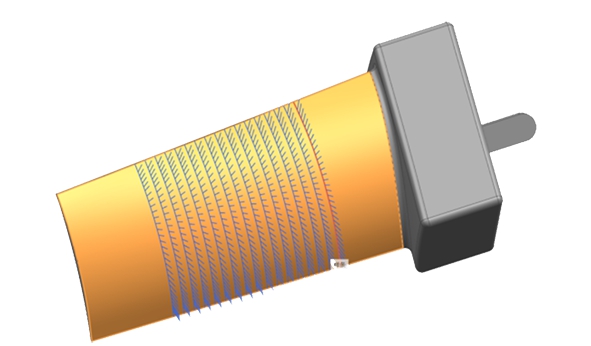
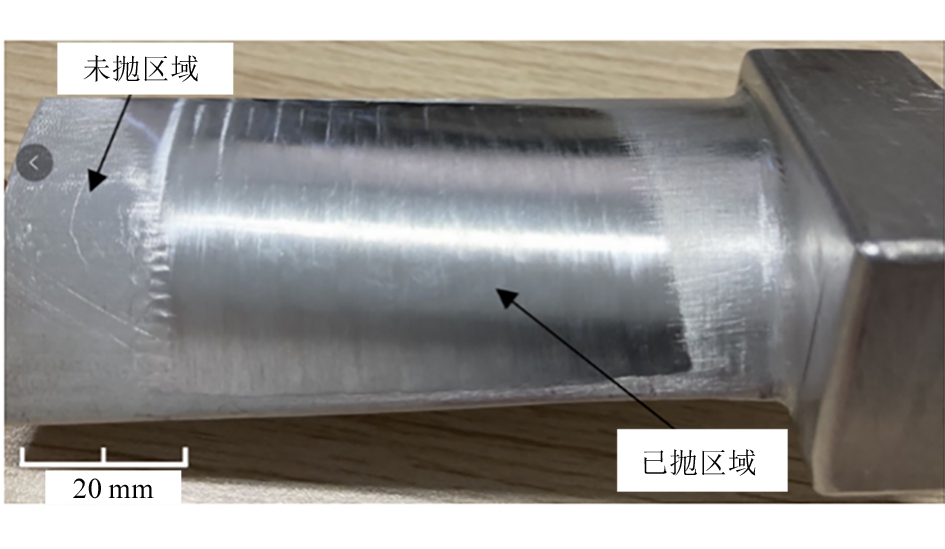
图 8 机器人固结磨料磨头抛光叶背现场
Figure 8. On-site polishing of blade convex with robot consolidated abrasive grinding head
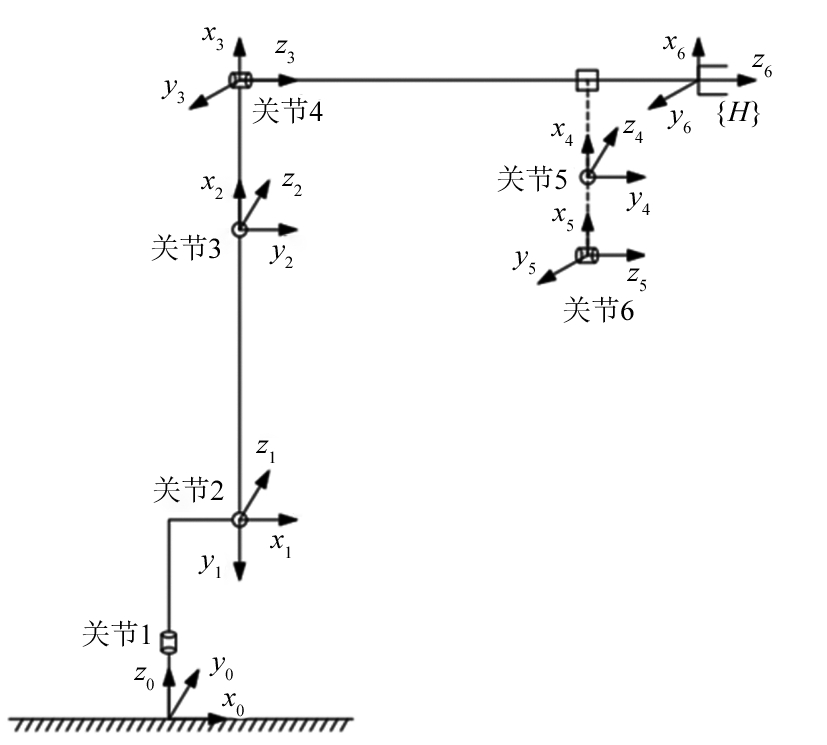
表 1 IRB4600-60/2.05机器人D-H参数
Table 1. IRB4600-60/2.05 robotic D-H parameters

-

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 615
- HTML全文浏览量: 246
- PDF下载量: 27
- 被引次数: 0
 邮件订阅
邮件订阅 RSS
RSS
