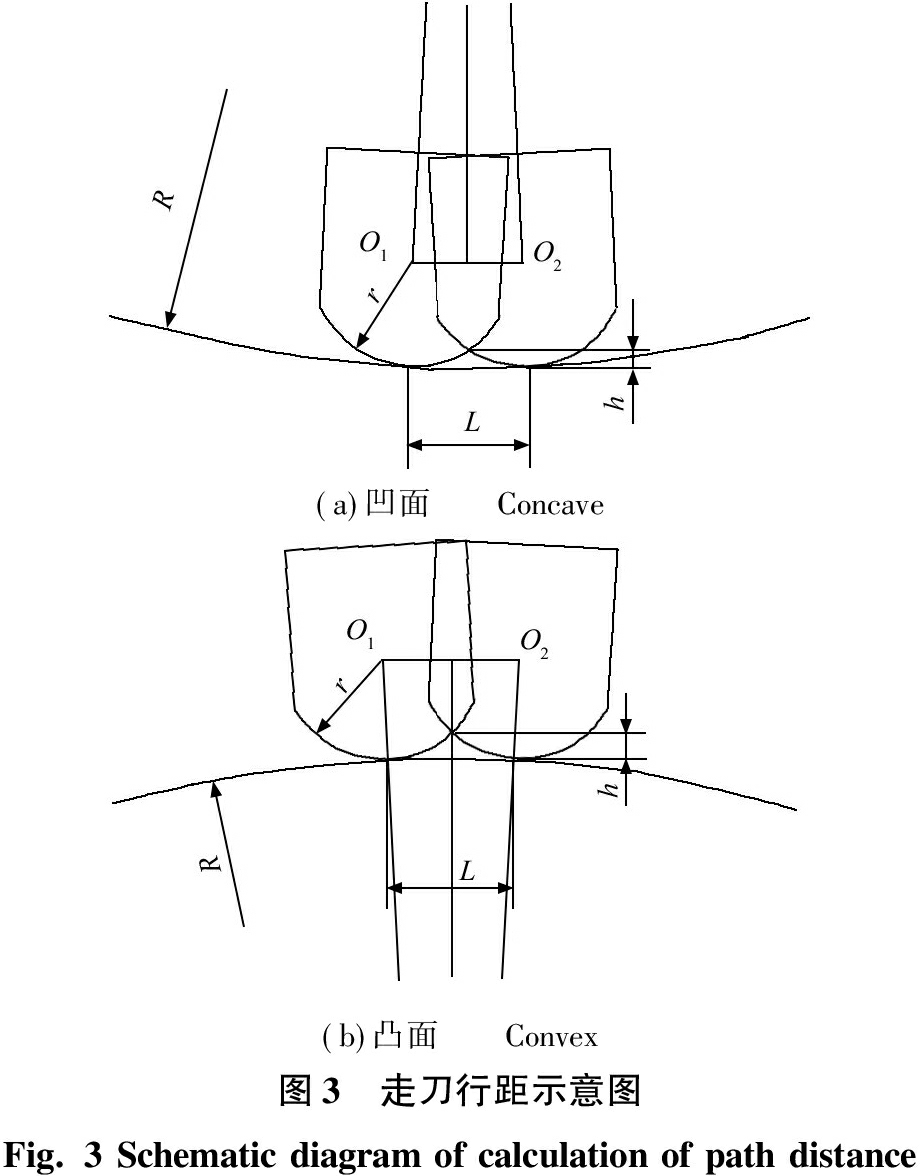
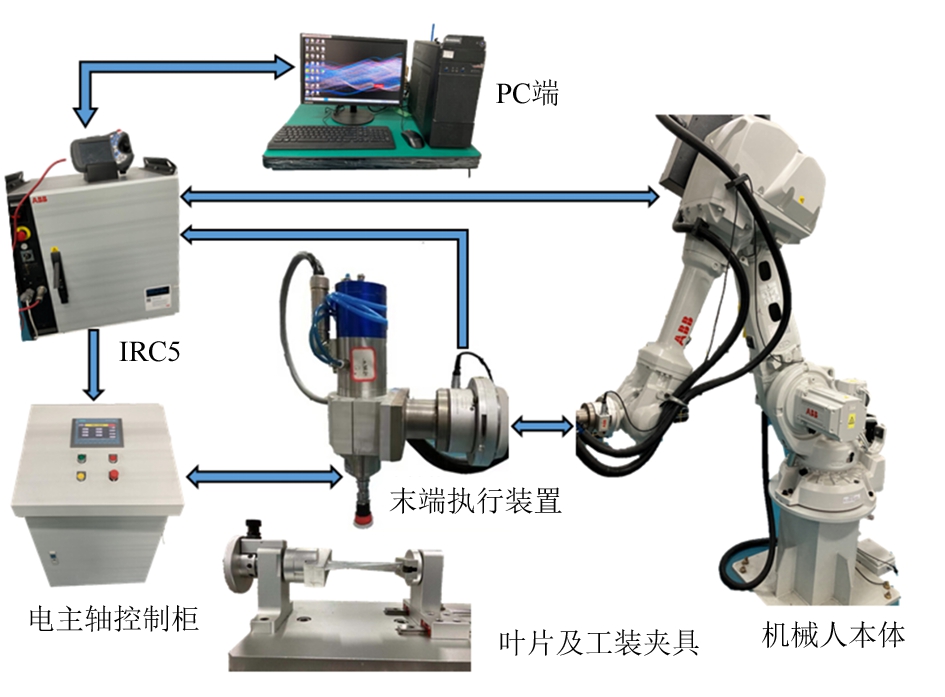
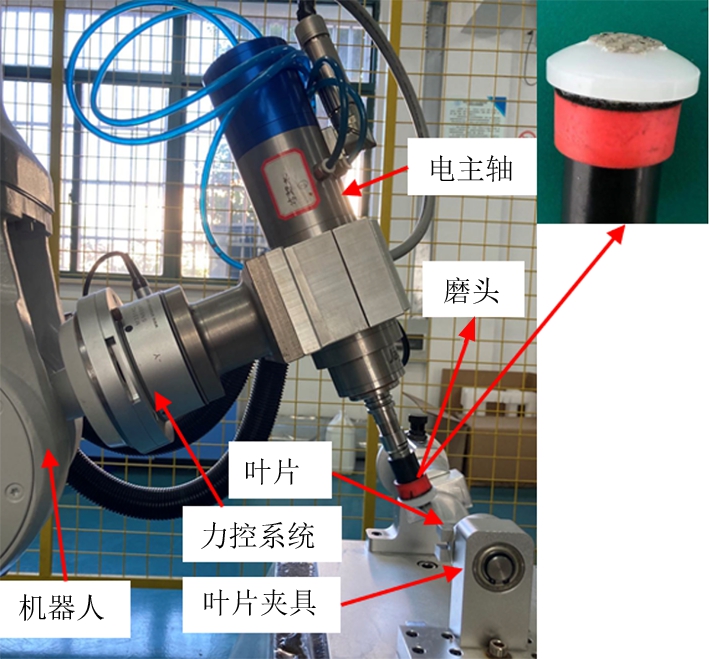
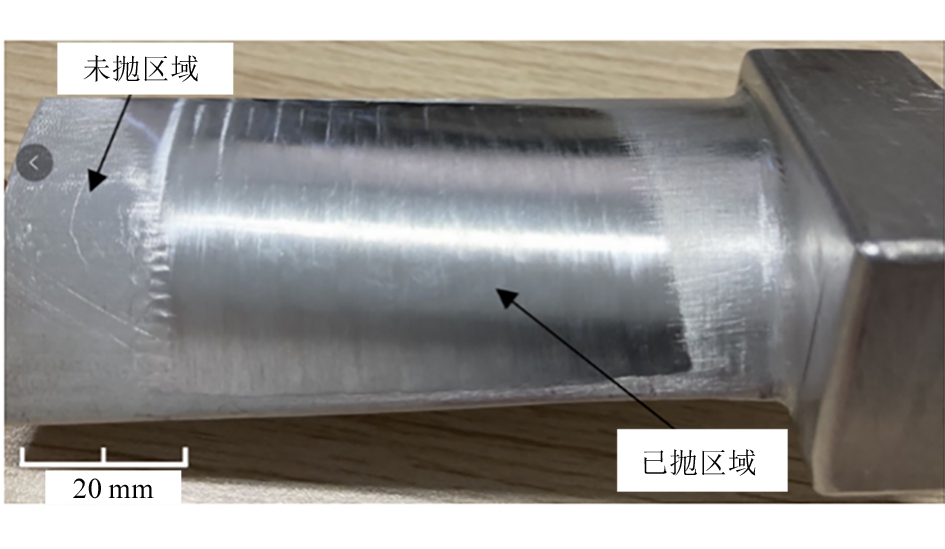
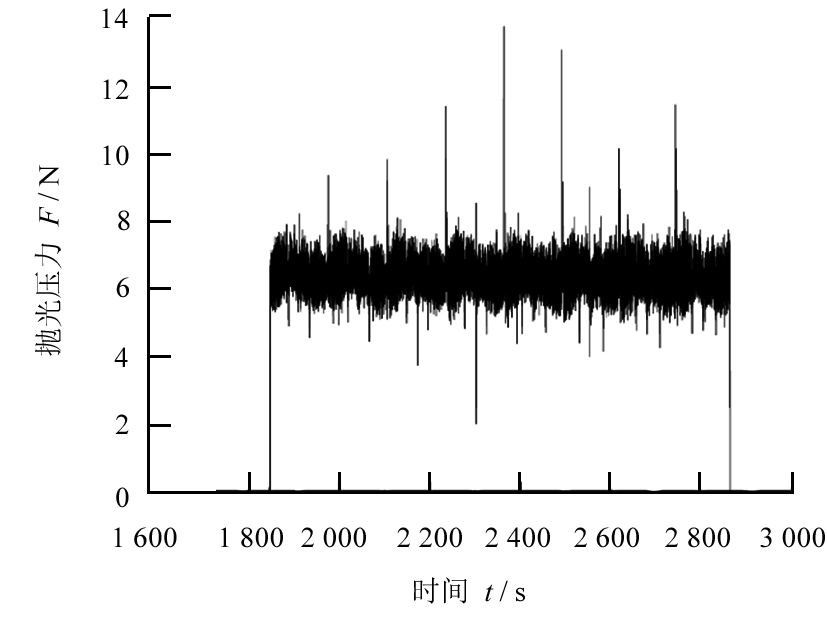
The 6R robotic and the fixed abrasive polishing technology were combined to develop a robotic-based fixed abrasive polishing system.The constant chord-height error method and the improved constant residual-height method were used for planning blade polishing path.Based on the secondary development of the software UG, path planning algorithm was realized and the data of cutter points was extracted.Combining with the inverse kinematics algorithm of robot and polishing process parameters, the off-line programming of polishing path was realized, and the blade polishing test was verified on the constant pressure polishing test platform of robot consolidated abrasive grinding head.The main results show that the average surface roughness of the blade is 0.240 μm, the standard deviation of the roughness is 0.039 μm, and the polishing pressure error is ±0.7 N. The high consistency of surface quality of blade was obtained by applying the robotic-based consolidated abrasive grinding head.






 Email Alerts
Email Alerts RSS
RSS DownLoad:
DownLoad: